gallery
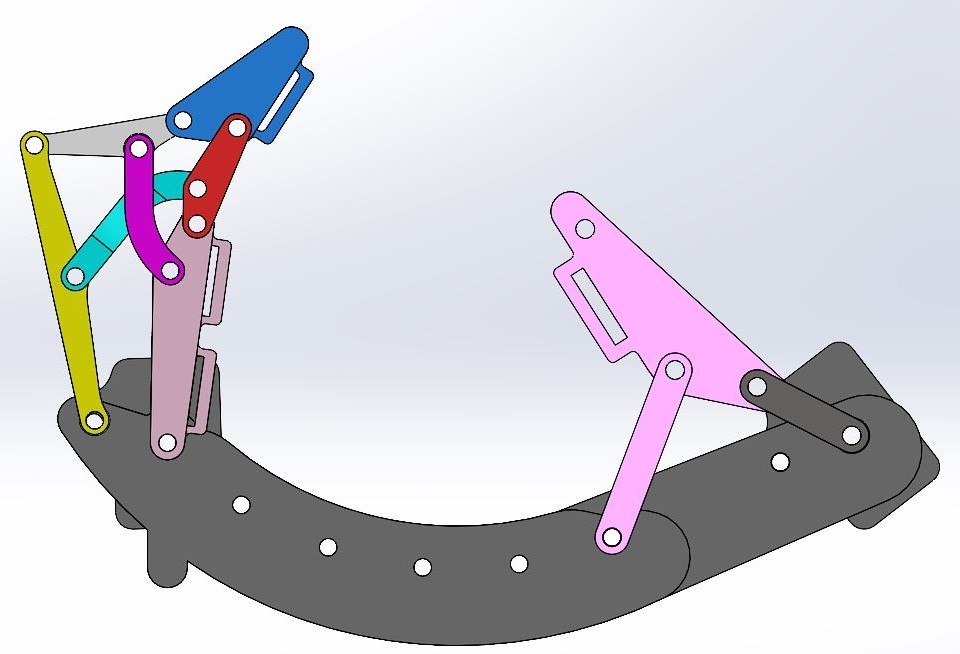
SolidWorks design of thumb-index finger system
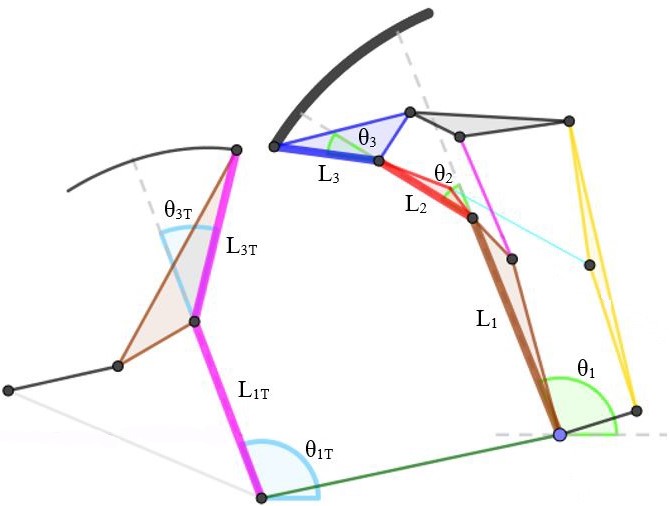
Design of the thumb-index finger constructed in GeoGebra. The 3R
backbone chain for the index finger and the 2R backbone chain for
the thumb are shown with thicker lines labelled L1, L2, L3, L1T &
L3T, respectively. The joint angles related to the model (Fig 1) are
displayed as well.
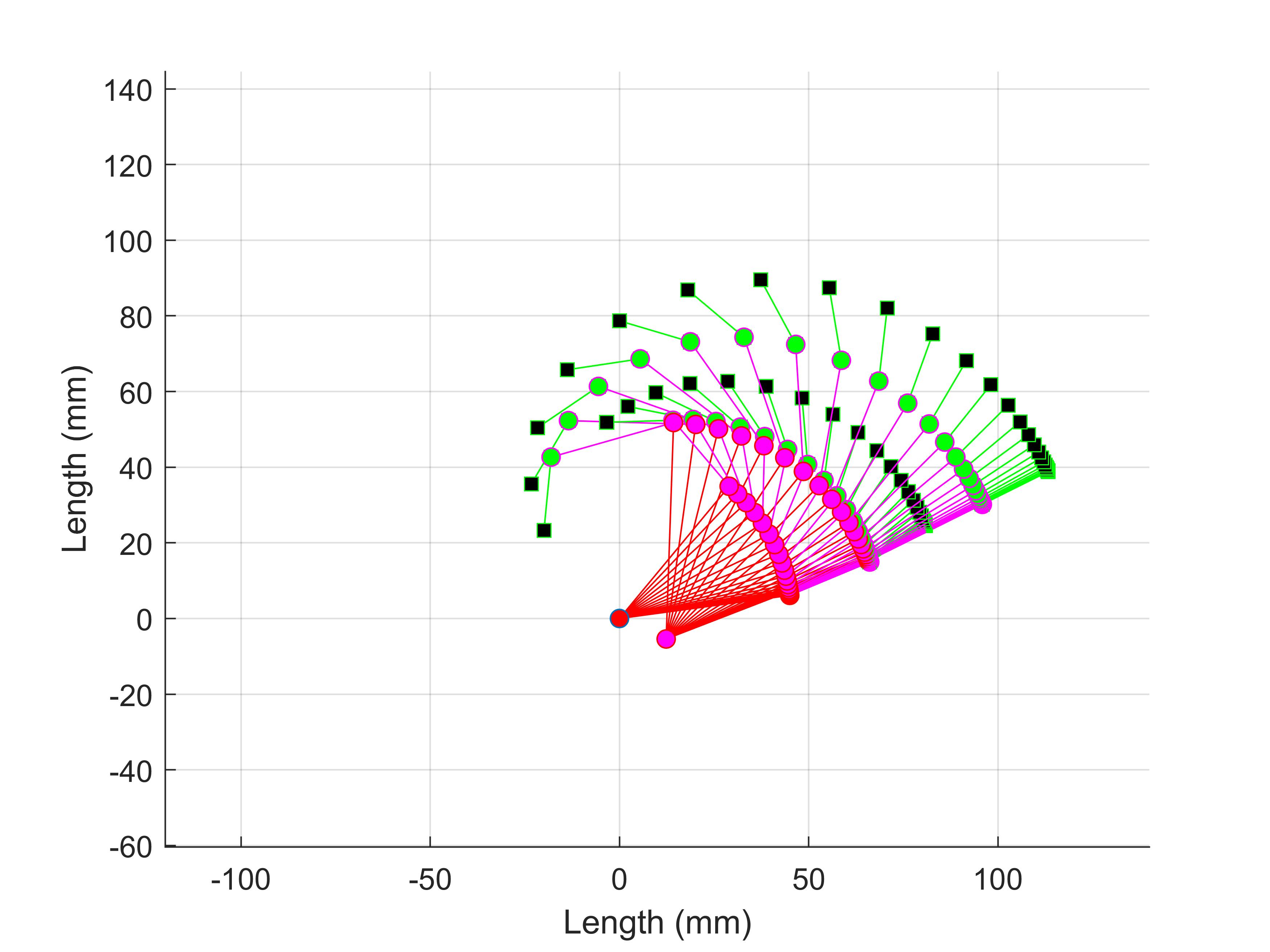
Calculated joint rotation angles for changes in R of a hyperbolic
function. Plot (a) shows the R-Profile and derived joint angles over
time and (b) shows the simulated step-wise motion of finger joints
(displayed with a speed of 0.1 sec per frame).