gallery
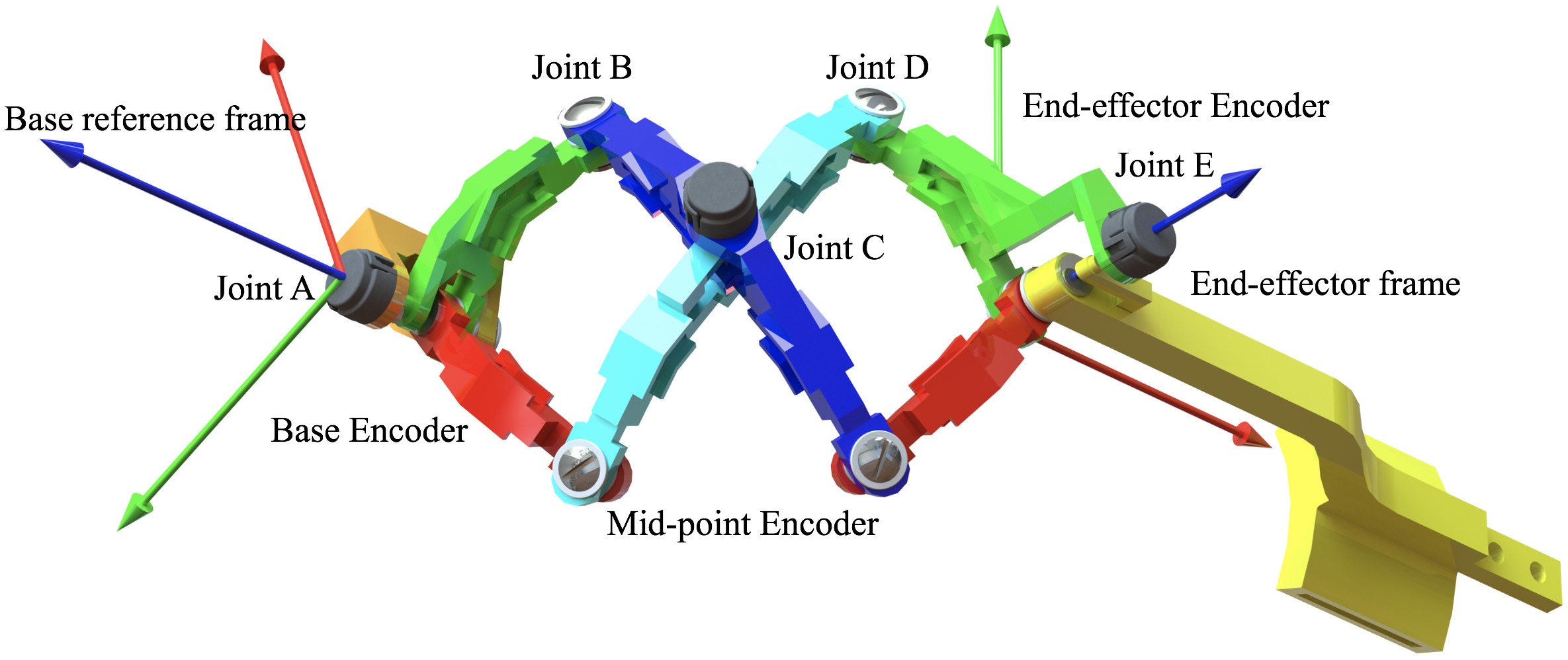
A solid model of the spherical exoskeleton system that shows
thespherical scissor mechanism that wraps around the shoulder of the
patient.
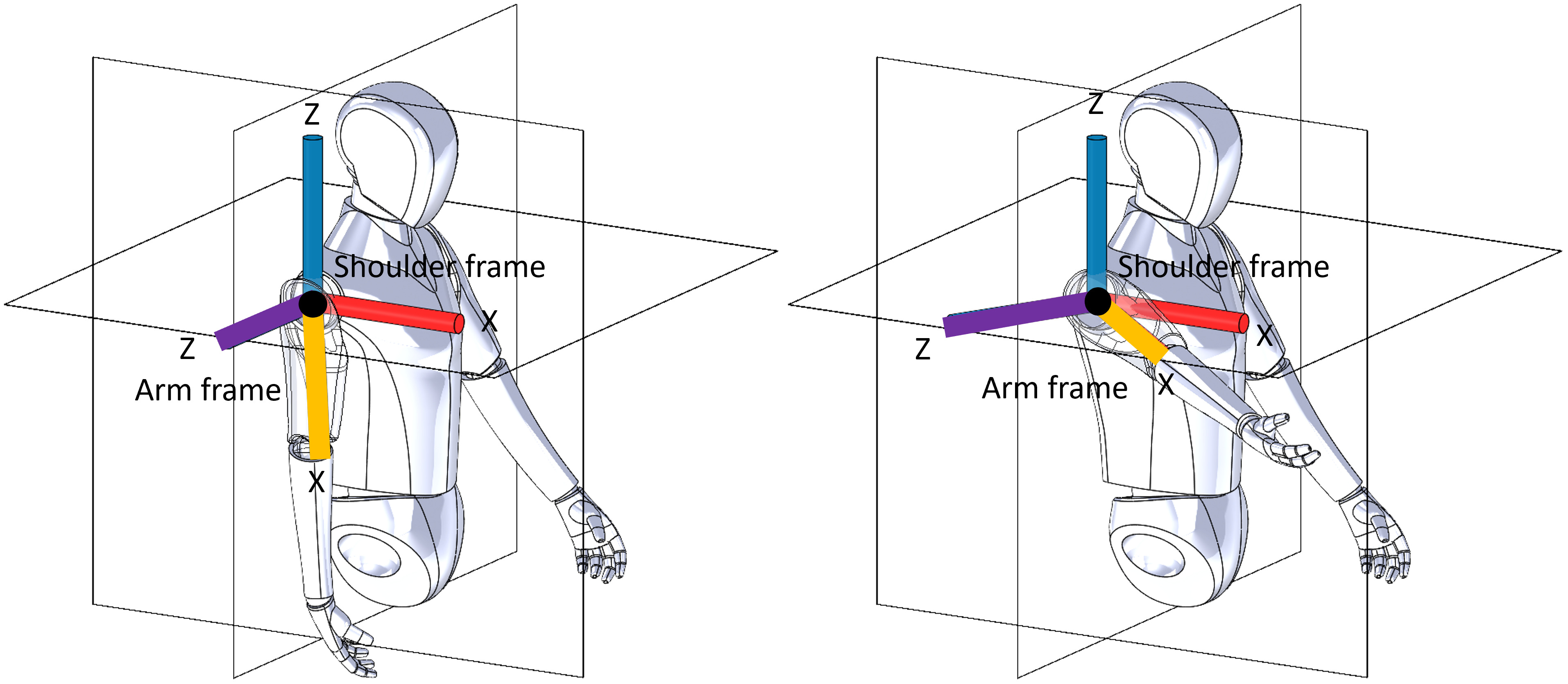
The two-revolute robotic arm on the shoulder joint showing baseframe
and end-effector frame. The left figure is the position of initial
state. Theright figure is the position of flexion 90◦ and horizontal
external rotation 45◦.
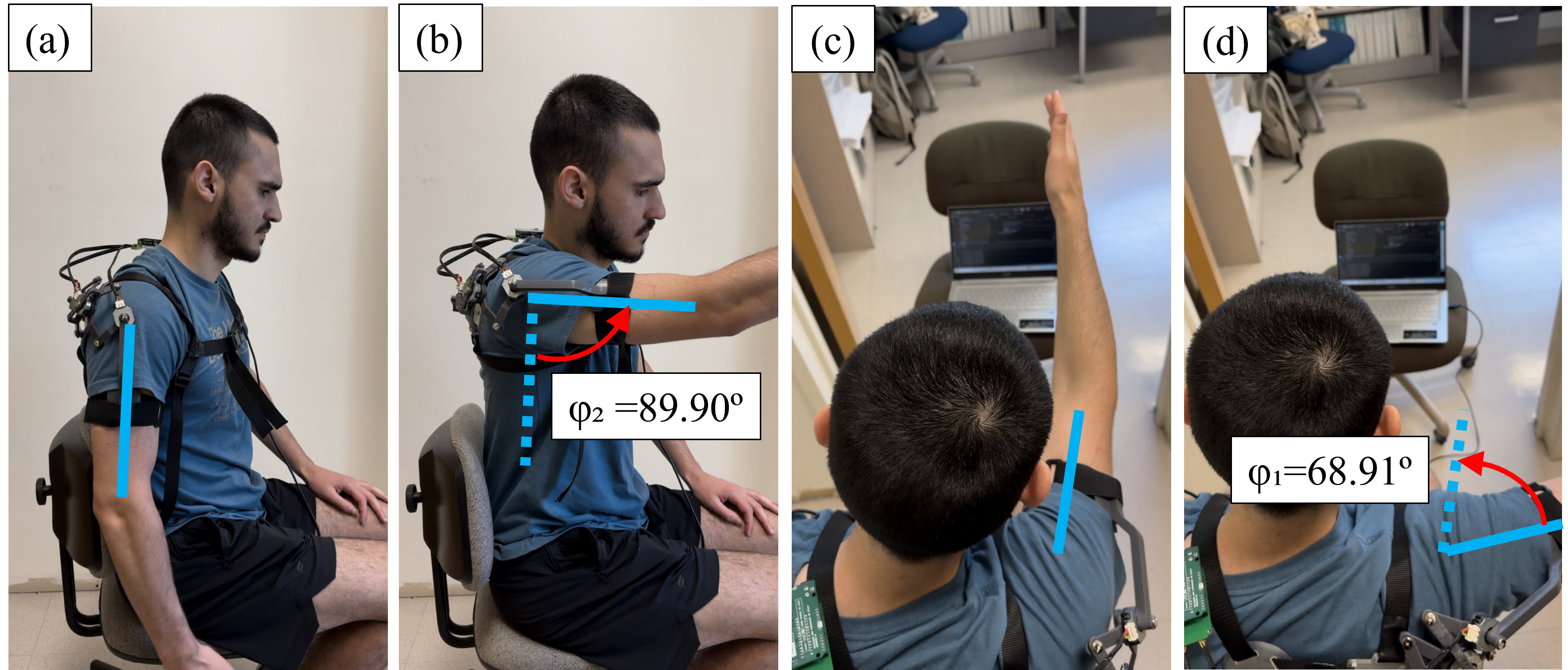
Photographs of flexion and external rotation test using the
rebuiltshoulder exoskeleton (black). (a) Initial position, side
view, (b) flexion move-ment, side view, (c) flexion movement, top
view, (d) external rotation, top view.